
Khái niệm
SPI viết tắt của Serial Peripheral Interface, SPI bus – Giao diện ngoại vi nói tiếp, bus SPI. Chuẩn SPI được phát triển bởi Motorola. Đây là một chuẩn đồng bộ nối tiếp để truyền dữ liệu ở chế độ song công toàn phần (full- duplex) tức trong cùng một thời điểm có thể xảy ra đồng thời quá trình truyền và nhận. Đôi khi SPI còn được gọi là chuẩn giao tiếp 4 dây (Four-wire).
SPI là giao diện đồng bộ, bất cứ quá trình truyền nào cũng được đồng bộ hóa với tín hiệu clock chung. Tín hiệu này sinh ra bởi master.
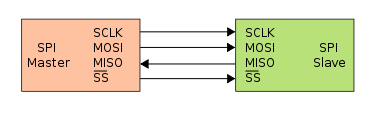
Trong giao diện SPI có bốn tín hiệu số:
- MOSI hay SI – cổng ra của bên Master ( Master Out Slave IN). Đây là chân dành cho việc truyền tín hiệu từ thiết bị chủ động đến thiết bị bị động.
- MISO hay SO – Công ra bên Slave (Master IN Slave Out). Đây là chân dành cho việc truyền dữ liệu từ Slave đến Master.
- SCLK hay SCK là tín hiệu clock đồng bộ (Serial Clock). Xung nhịp chỉ được tạo bởi Master.
-
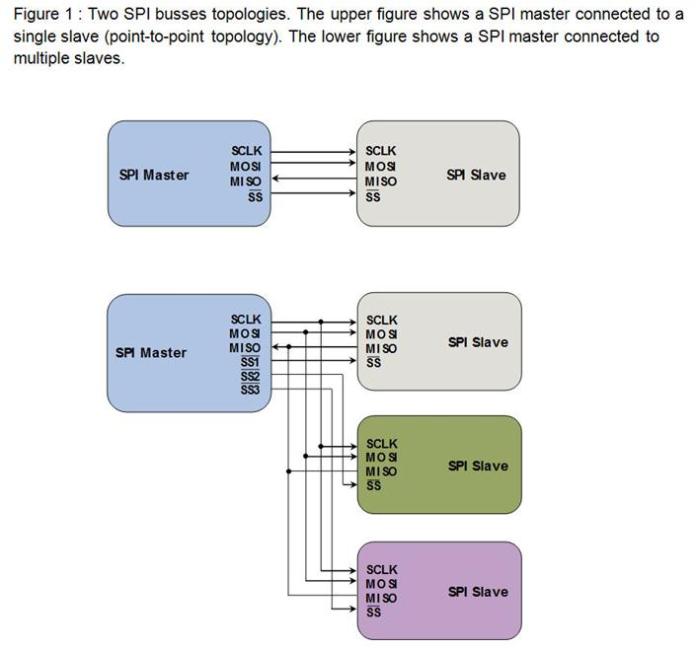
CS hay SS là tín hiệu chọn vi mạch ( Chip Select hoặc Slave Select). SS sẽ ở mức cao khi không làm việc. Nếu Master kéo SS xuông thấp thì sẽ xảy ra quá trình giao tiếp. Chỉ có một đường SS trên mỗi slave nhưng có thể có nhiều đường điều khiển SS trên master, tùy thuộc vào thiết kế của người dùng.
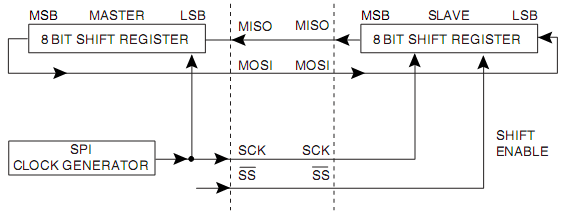
Nguyên lý hoạt động
Để bắt đầu hoạt động thì kéo chân SS xuống thấp và kích hoạt clock ở cả Maser và Slave.
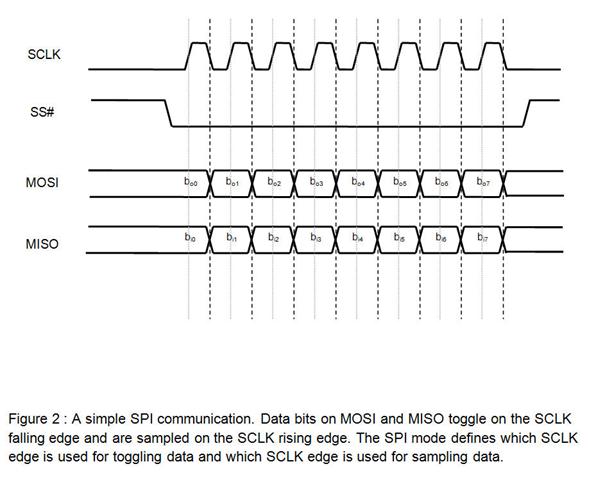
Mỗi chip Master hay Slave có một thanh ghi dữ liệu 8 bits.
Cứ mỗi của xung nhịp do Master tạo ra trên đường giữ nhịp SCK, một bit trong thanh ghi dữ liệu của Master được truyền qua Slave trên đường MOSI, đồng thời một bit trong thanh ghi dữ liệu của chip Slave cũng được truyền qua Master trên đường MISO.
Lưu ý, có thể config tín hiệu đồng bộ clock theo sườn, theo mức ….
Hiện tại có 4 mode cơ bản (MODE 0. 1,2,3) của SPI dựa vào config SCLK như sau:
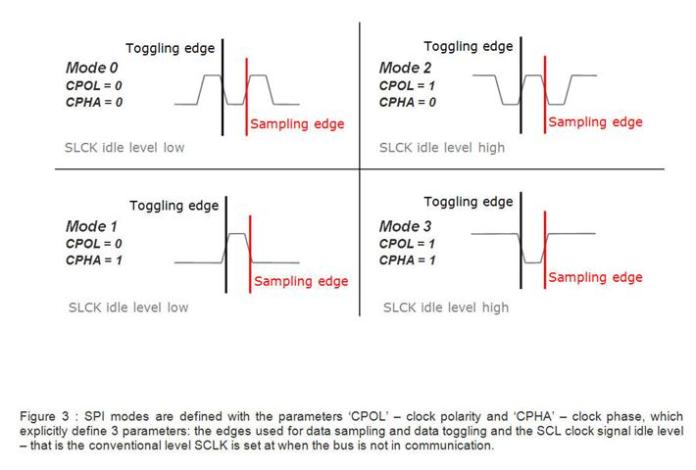
Cực của xung giữ nhịp, phase và các chế độ hoạt động: cực của xung giữ nhịp (Clock Polarity) được gọi tắt là CPOL .Đây là khái niệm dùng chỉ trạng thái của chân SCK ở trạng thái nghỉ.
Ở trạng thái nghỉ (Idle), chân SCK có thể được giữ ở mức cao (CPOL=1) hoặc thấp (CPOL=0).
Phase (CPHA) dùng để chỉ cách mà dữ liệu được lấy mẫu (sample) theo xung giữ nhịp.
Dữ liệu có thể được lấy mẫu ở cạnh lên của SCK (CPHA=0) hoặc cạnh xuống (CPHA=1).
Sự kết hợp của SPOL và CPHA làm nên 4 chế độ hoạt động của SPI. Nhìn chungviệc chọn 1 trong 4 chế độ này không ảnh hưởng đến chất lượng truyền thông mà chỉ cốt sao cho có sự tương thích giữa Master và Slave.
Do 2 gói dữ liệu trên 2 chip được gởi qua lại đồng thời nên quá trình truyền dữ liệu này được gọi là “song công”.
So sánh SPI và I2C
Từ những trình bày ở trên, ta có thể đưa ra các nhận xét và so sánh với I2C như sau:
-
Bus topology / Routing / Resouce
I2C chỉ cần 2 dây trong khi SPI cần ít nhất 3 – 4 dây (Trong trường hợp dùng SPI muốn thêm Slave thì sẽ tăng số lượng dây). Việc tạo Bus I2C cũng dễ dàng hơn nhiều so với SPI do chỉ cần 2bit là có thể kết nối được số thiết bị lớn (7bit).
-
Tốc độ
Về tốc độ thì SPI tỏ ra vượt trội so với I2C. SPI là full-duplex, không giới hạn tốc độ tối đa thường hơn 10Mbps. Trong khi đó I2C giới hạn tốc độ thông thường 1Mbps nếu ở fasst mode và 3.4Mbps ở High speed mode.
-
Tính năng
I2c có nhiều tính năng cao cấp hơn như automatic multi-master conflicts handling and build-in address management. Tuy nhiên chính điều này lại làm giảm tốc độ.
SPI thì rất dễ thực hiện và cung cấp rất nhiều tính linh hoạt cho tiện ích mở rộng và các biến thể.



{kind=link}